Engineering Prowess
Home
Autonomous Flight
About
Sign in
Subscribe
autonomous-flight
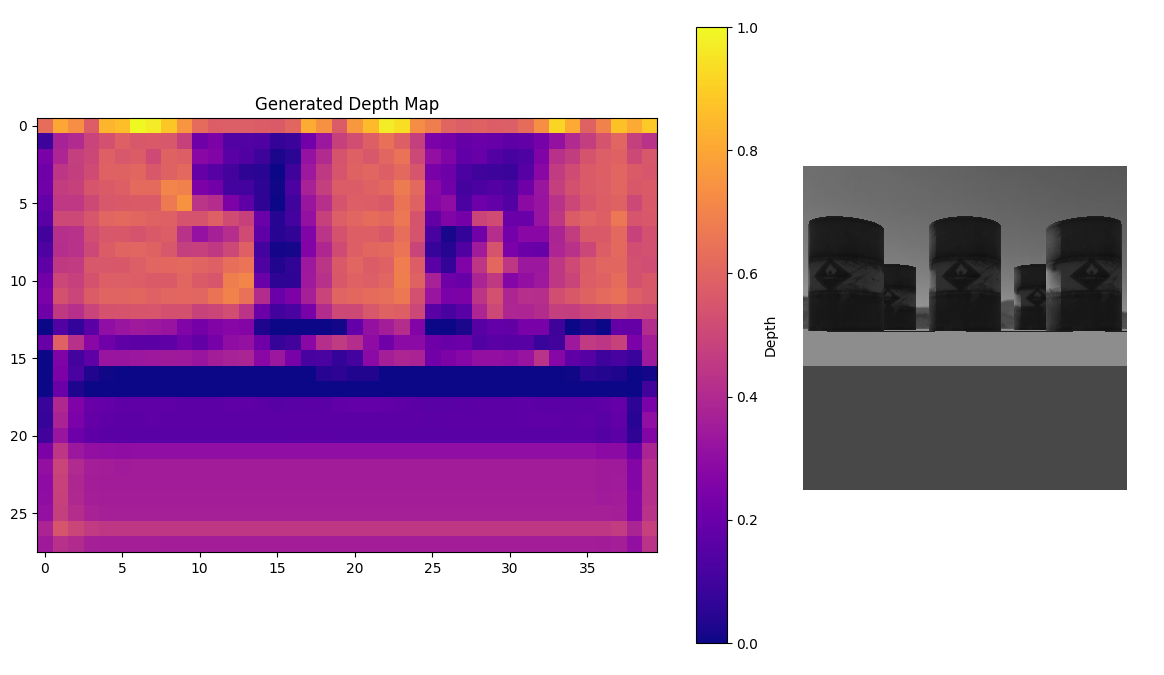
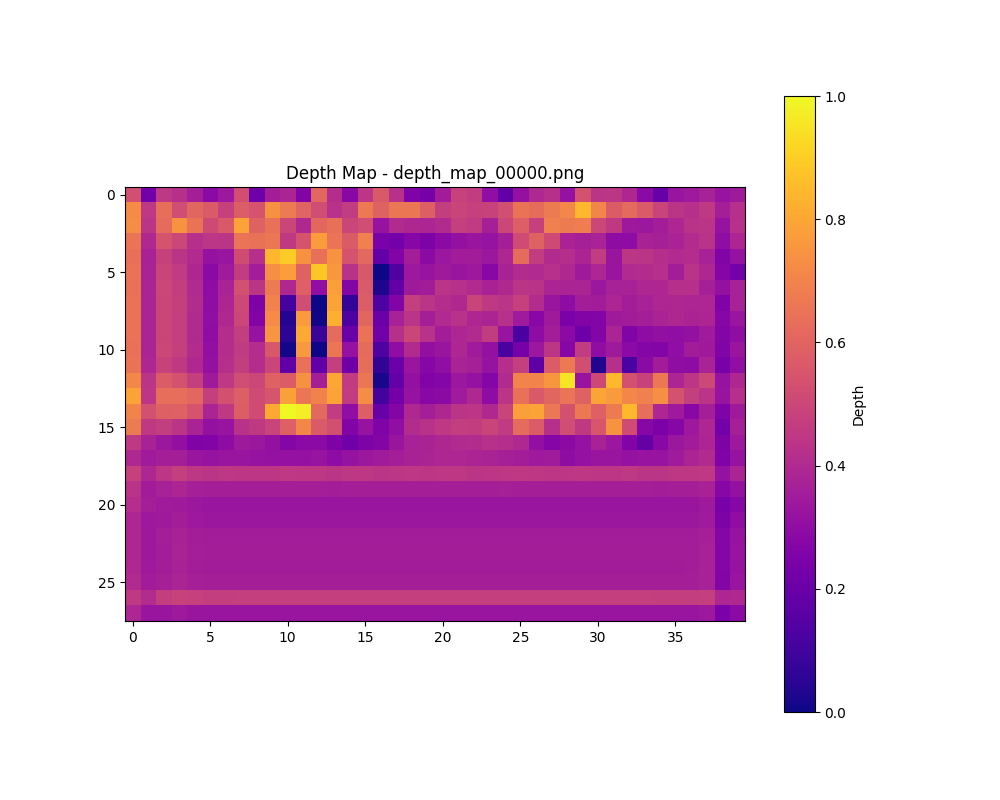
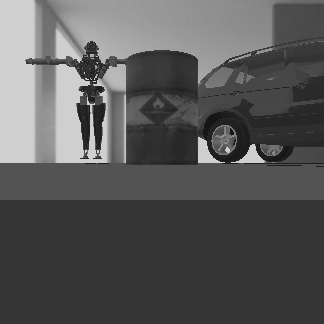
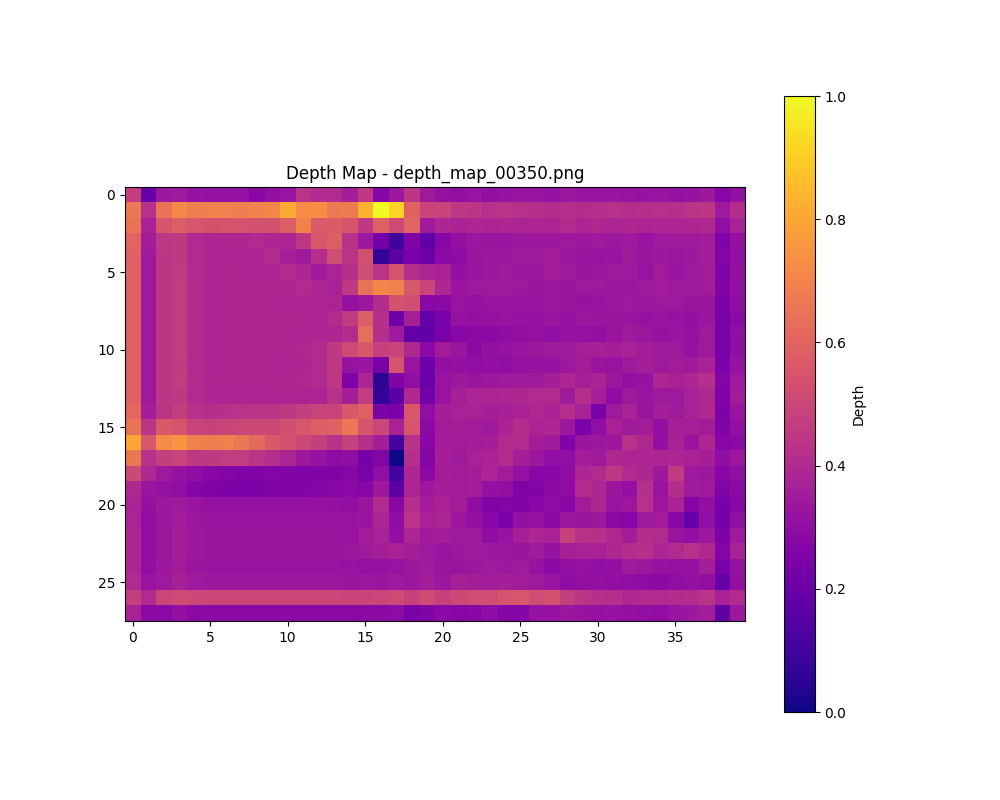
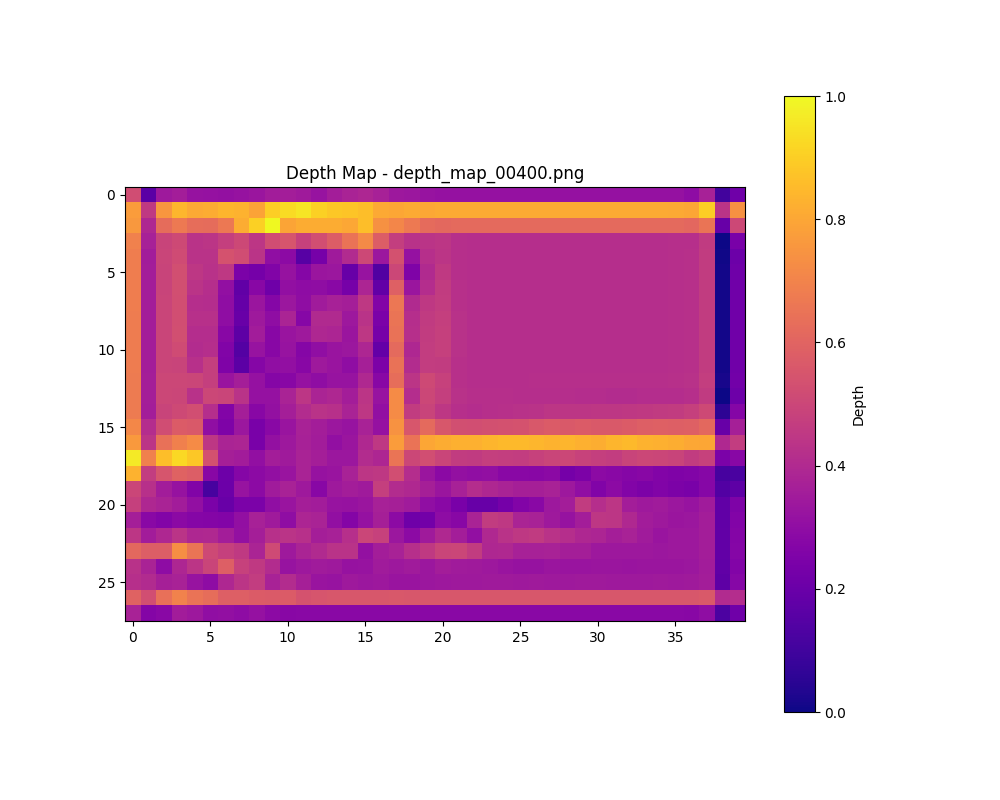
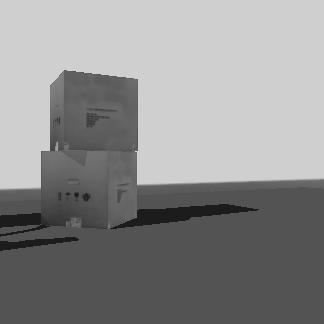
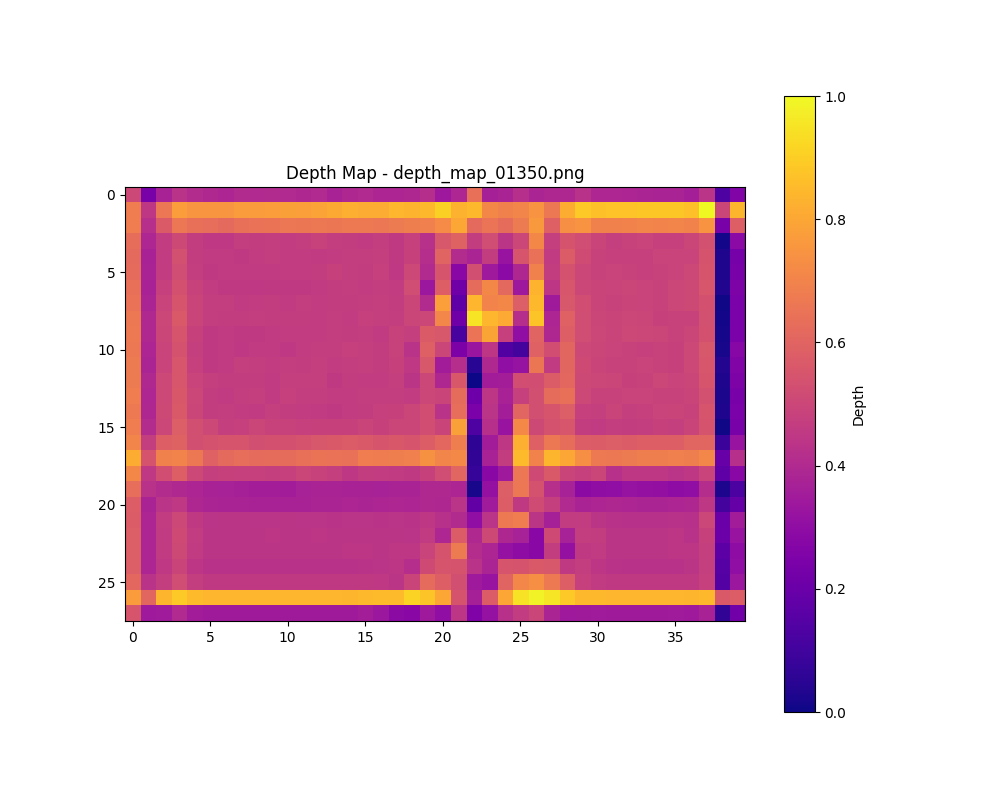
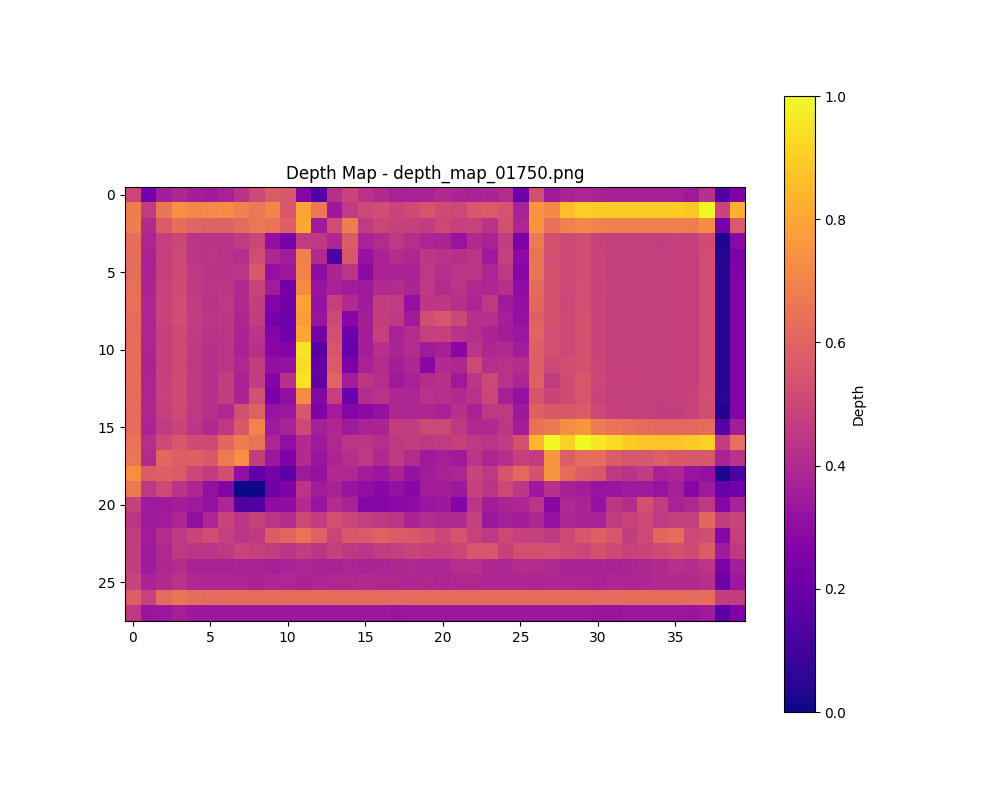
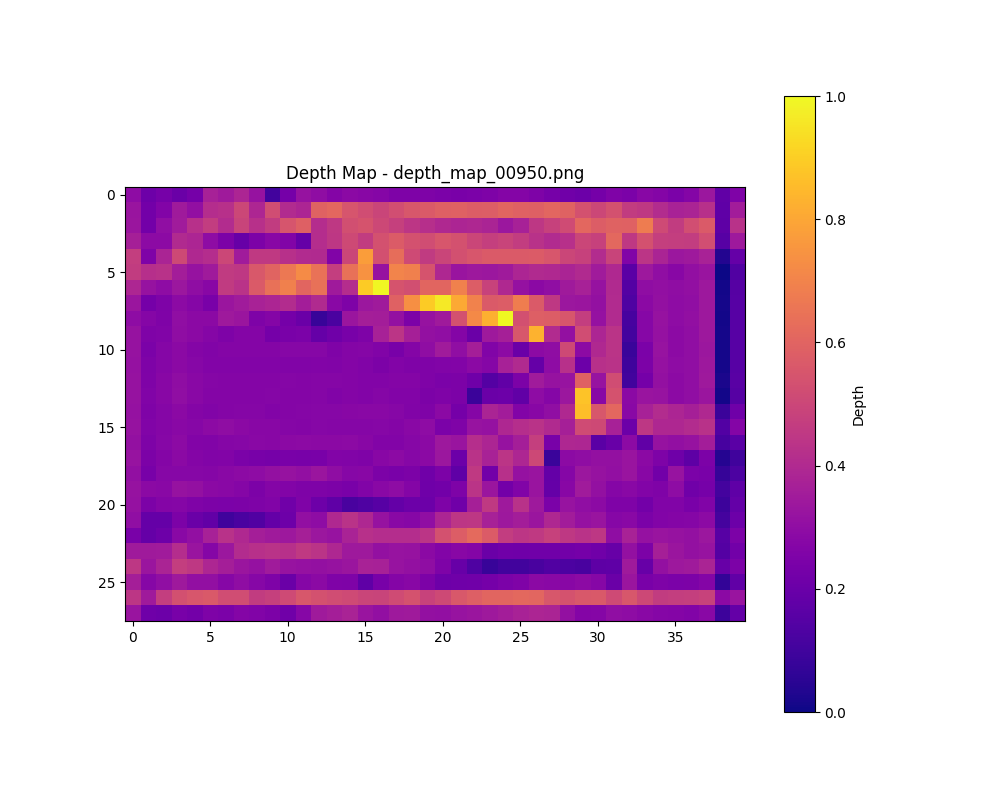
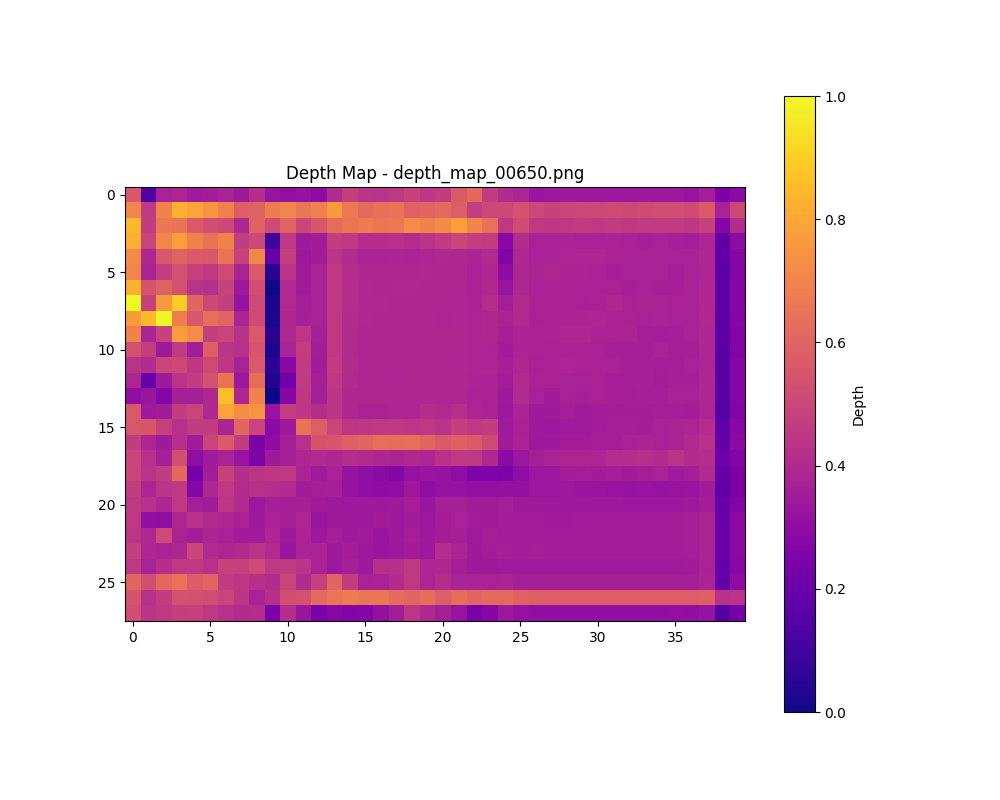
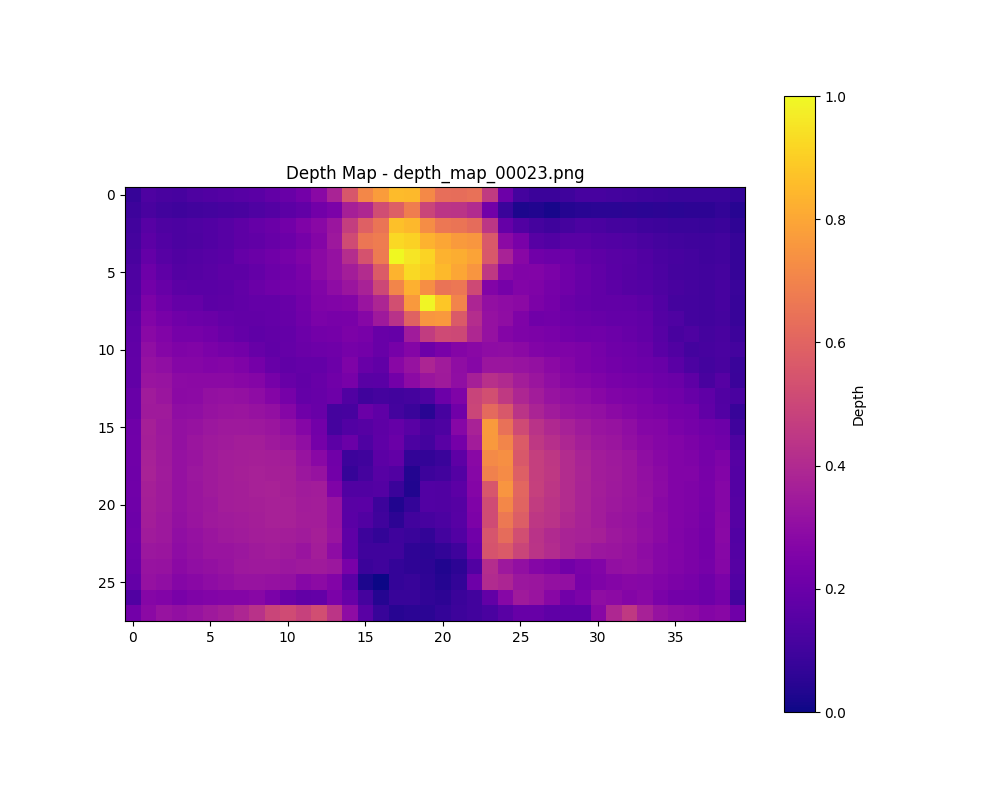
A Gallery of Depth Maps
Brent Noble
26 May 2025
•
2 min read